Microbot sumo SASORI





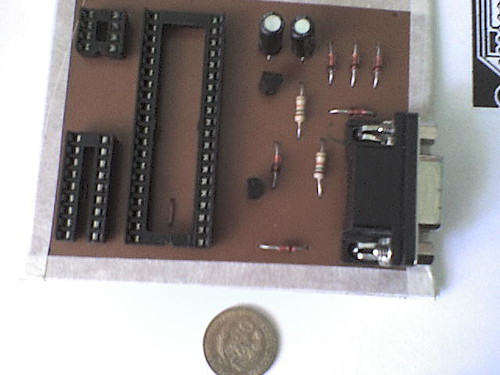
mi grabador de pics
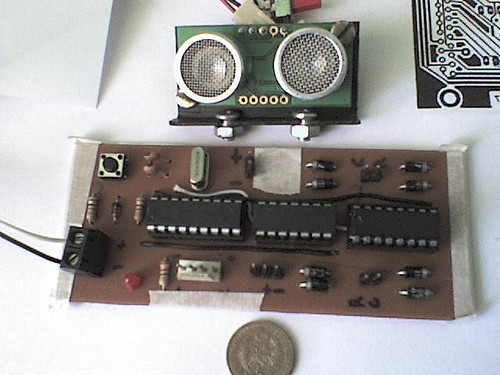
el sonar SRF05

Se llama SASORI se utilizo los siguientes componentes:
1 SFR05 (sonar para detectar objetos)
1 sensor CNY70 (detector de borde)
1 Microcontrolador PIC 16F84A
2 Servomotores respectivamente trucados
1 Inversos schmitt trigger 40106
1 Dual Driver L293B
batería de 5 volts para los servomotores y 4 pilas recargables de 1.2Volts para la lógica de 5V también mecano para la parte física
La programación del PIC se realizo con el software WINPIC800
La compilación del programa se realizo con el software MPLAB de la Microchip
el programa es el siguiente:
programa en ASM
programa en HEX
esquema en eagle
board en eagle
la simulación en el PROTEUS solo tienen que cargar el *.HEX en el PIC
Para la parte física como se ve en las imágenes se uso un mecano metálico espero subir un videito del robot el problema es q es super lento es cuestión de modificar la parte motriz cambiar de motor o las ruedas bueno eso es todo ...creo
hi all ^^,salu2 y SUERTE!...

